The Repository has all files needed to rebuild the original Moveo. But this is not what I want to do. I prefer not to use the same electronics because the original electronics are based on the same electronics used by 3D printing. In my opinion, that does not fit very well. In the first part of this project, I’ll concentrate on all the mechanical parts, motors included. But I don’t purchase an old Rambo board for 3D-printers as needed if you want to build the original Moveo. The original project is from 2016.

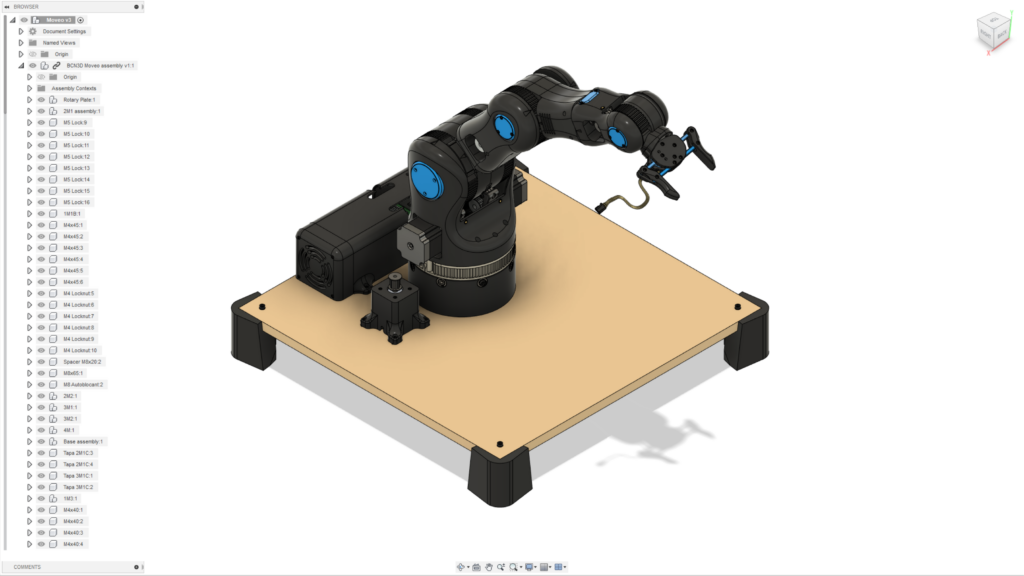
The Repository contains the STL Files for the Robot and the Solid-Work files. I’m using Fusion 360 so I can import Solid-Work files with ease.
The Firmware isn’t interesting from my perspective because I didn’t have the same electronics and I won’t use the Marlin Firmware either.
The BOM (Build of Material) is at this Point the most important part. The Manuel is somewhat useful, but we have already the Solid-Work file, so we know where everything should be placed.
the next post will be about the BOM itself, what we need etc.
Leave a Reply